

Foxglove Studio now supports ROS 2 data with IDL-defined message schemas. You can now use .msg or .idl definitions to load ROS 2 data into Foxglove Studio, without any other changes to your workflows.
While ROS 2 users typically define message types using the .msg schema encoding, ROS 2 also supports a subset of the OMG IDL spec for compatibility across ROS and non-ROS components. If you’ve been using rosbag2 to record data, you can use this same package to write both .msg and .idl schemas to MCAP files.
When you load MCAP files in Foxglove Studio for visualization and analysis, ROS 2 will parse their contained ros2msg and ros2idl schemas to deserialize messages on demand.
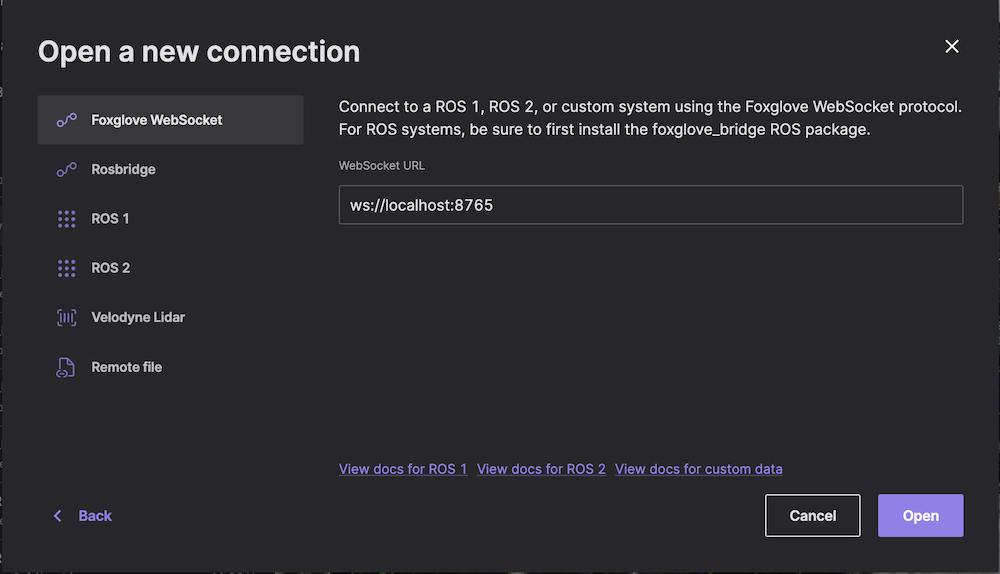
You can also connect live to your ROS 2 stack with the Foxglove WebSocket connection, which now supports IDL schema messages. First install the foxglove_bridge package to get connected:
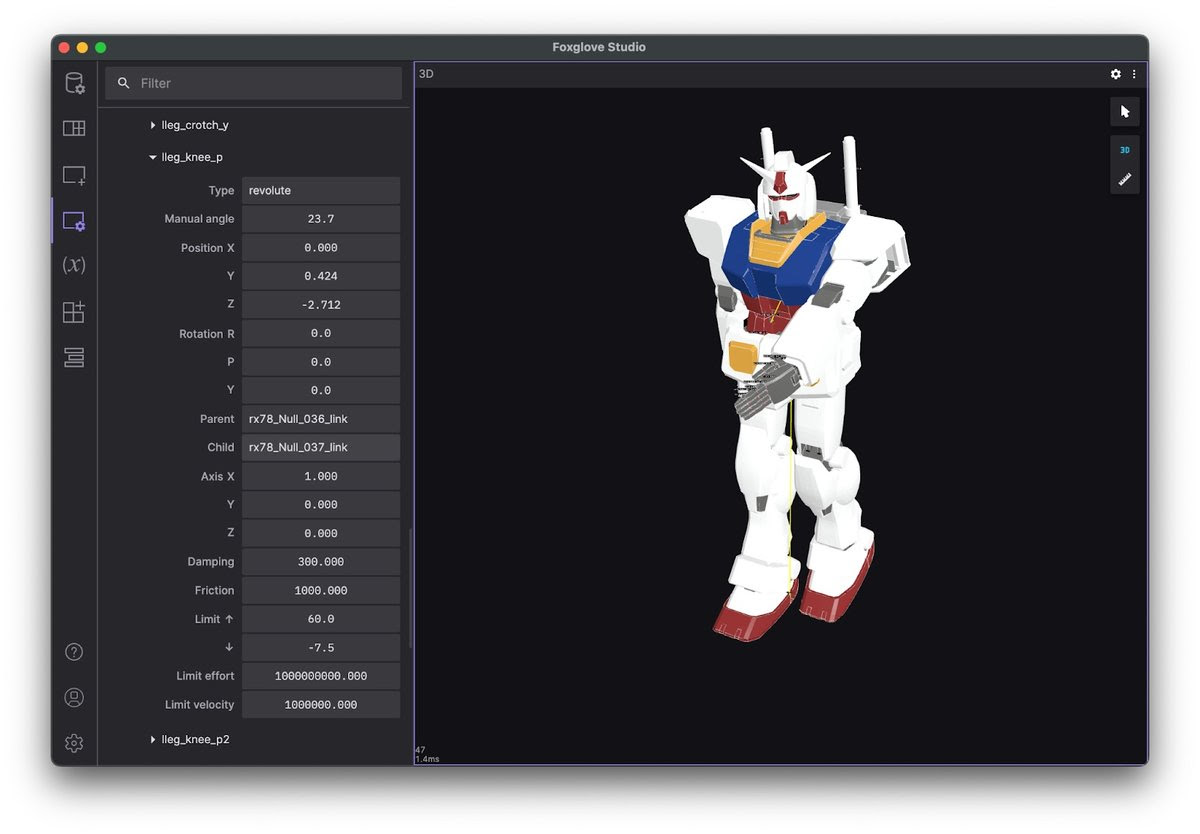
 URDF support in the 3D panel
URDF support in the 3D panel
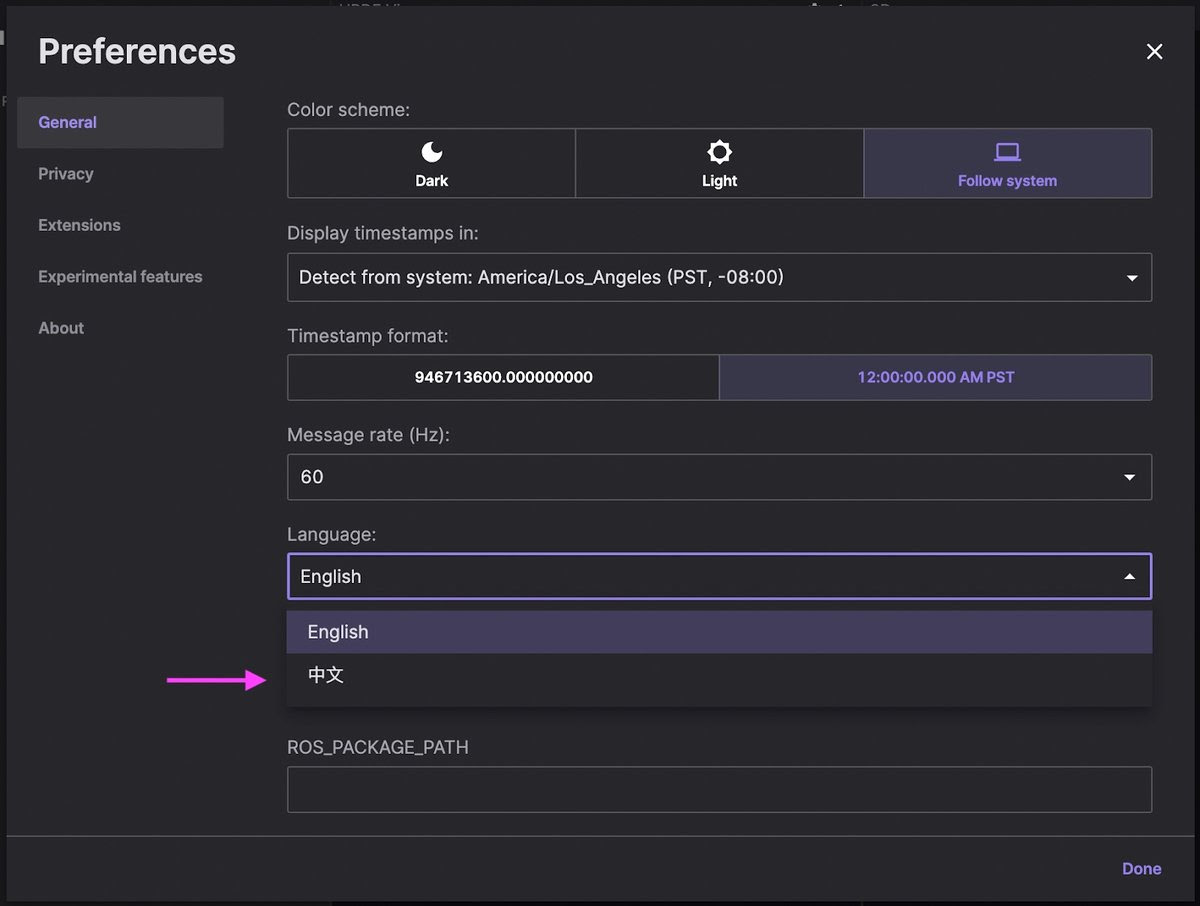
 Foxglove Studio now speaks Chinese
Foxglove Studio now speaks Chinese
Thanks to a Foxglove community member’s contribution, Foxglove Studio now offers initial support for Chinese translations, as well as a framework for others to contribute more languages in the future.
 Max Polzin on debugging robots on glaciers
Max Polzin on debugging robots on glaciers
This month on the Foxglove blog, we sat down with PhD student Max Polzin to discuss his latest project – building autonomous robots to scale and measure glacial moulins in the French Alps.
Max conducts research at EFPL’s Computational Robotics Design and Fabrication Lab, where he focuses on developing novel robots for extreme environments like boreal forests, mountainous slopes or polar glaciers.

Check out our other user spotlights to see how the community has been leveraging Foxglove for their projects!
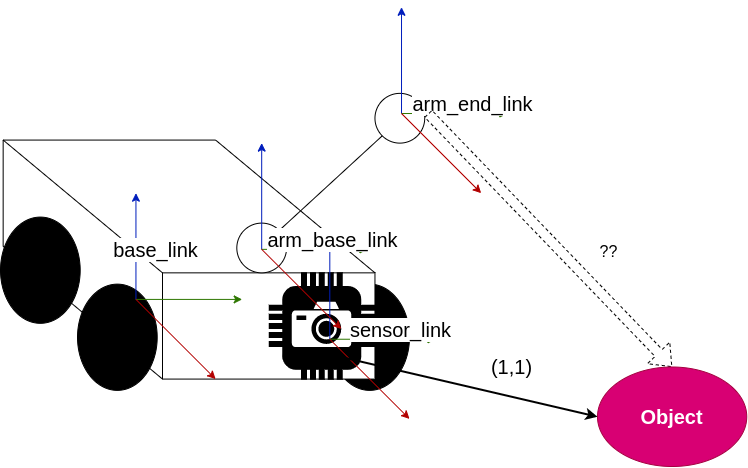
 Tutorial: Calculating object positions in ROS
Tutorial: Calculating object positions in ROS
To continue our series of ROS tutorials, we’ve released two guides on how to use ROS 1 and ROS 2 transforms to calculate the position of detected objects.
Check out our tutorials page for a full list of all ROS, Foxglove Studio, and Foxglove Data Platform guides.
For more details, you can check out the rosbag2_storage_mcap package for writing ROS 2 data to MCAP files, as well as the foxglove/rosmsg package for parsing ROS .msg and .idl message definitions. You can also reference the MCAP docs for reading and writing MCAP files with our helper libraries (available in Python, C++, and more).
You can also join our Slack community to share your feedback and get live support from the Foxglove team.
If you have any questions or feedback, reach out directly to the Foxglove team in our Slack community for support.